ROS2 TF2¶
Introduction¶
This tutorial explains static and dynamic transforms. ROS is using the package tf2_ros as an easy accessible and intuitive API to describe the relationship between coordinate frames. The online documentation can be found at http://wiki.ros.org/tf2.
Lines beginning with $ are terminal commands.
To open a new terminal → use the shortcut
Ctrl + Alt + T.To open a new tab inside an existing terminal → use the shortcut
Ctrl + Shift +T.To kill a process in a terminal → use the shortcut
Ctrl + C.
Lines beginning with # indicate the syntax of the commands.
Code is separated in boxes.
Code is case sensitive.
Creating a Static Transform¶
A static transform is an invariant coordinate transformation and describes the relationship between two frames. A definition can be done through launch files by using the static_transform_publisher node, which contains a publisher to the /tf_static topic. Provide the following arguments to describe the relationship between a parent and a child frame:
Arguments: x y z yaw pitch roll parent_frame child_frame
The translation is in meters. The rotation is denoted as Euler angles in radians or in quaternion values as shown in the alternative below:
Arguments: x y z qx qy qz qw parent_frame child_frame
Create a new package myrobottf in your robot_ws workspace. Now create a launch file turtlebot3_tf.launch.py in this package. Use the given example as a skeleton (Euler angle syntax):
#!/usr/bin/env python3
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='tf2_ros',
node_executable='static_transform_publisher',
node_name='parent_to_child_tf',
arguments=['0.0', '0.0', '0.25', '3.14159', '0.0', '0.0', 'my_parent_frame', 'my_child_frame'],
output='screen'),
])
Create the transformation tree of the turtlebot3 by starting multiple running processes of the node static_transform_publisher. Take care to name them differently:
→ Relationship between the frames base_footprint and my_base_link:
Translation, t = (x, y, z)´ = (-1.0, 0, 0.01)´
Rotation, r = (roll, pitch, yaw)´ = (0, 0, 0)´
→ Relationship between the frames my_base_link and my_camera_rgb_optical_frame:
Translation, t = (x, y, z)´ = (0.015, 0.0913, 0.0945)´
Rotation, r = (roll, pitch, yaw)´ = (0, 0, 0)´
→ Relationship between the frames my_base_link and my_imu_link:
Translation, t = (x, y, z)´ = (0, 0, 0.068)´
Rotation, r = (roll, pitch, yaw)´ = (0, 0, 0)´
→ Relationship between the frames my_base_link and my_base_scan:
Translation, t = (x, y, z)´ = (-0.09, 0, 0.114)´
Rotation, r = (roll, pitch, yaw)´ = (0, 0, 0)´
Visualize the tf tree in Rviz:
$ ros2 launch myrobottf turtlebot3_tf.launch.py
$ ros2 run rviz2 rviz2
Click the Add button and choose TF, to visualize the tf information.
Hint
Switch your fixed_frame in RVIZ to the start frame of your tf tree, that is right now, base_footprint.
→ You should see the different coordinate frames of your Turtlebot3, based on your static transforms.
Creating a Dynamic Transform¶
Dynamic transforms are variant transformations, which change over time. The convenient way is to use the Python API to define frame relationships.
Dynamic TF Exercise¶
Write a transform Broadcaster and define a dynamic relationship between the frames odom and base_footprint. Therefore, create a node named simulated_odom.py in the package myrobottf. By providing changes in the translation values x and y, the turtlebot takes a simulated path. Use the following mathematical definition and the Python code example.

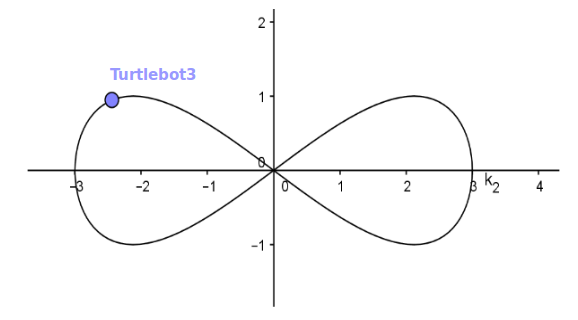
Figure 7 Image 1. Virtual Turtlebot Path¶
#!/usr/bin/env python3
import rclpy
import tf2_ros
import scipy
import numpy
from geometry_msgs.msg import TransformStamped
from scipy.spatial.transform import Rotation
cnt = 0
def calculate_position():
global cnt
if cnt > 300:
cnt = 0
cnt = cnt+1
x = 3* numpy.cos(cnt*0.02)
y = numpy.sin(2*cnt*0.02)
position = (x,y)
return position
def calculate_tf():
global mydynamictf
t = TransformStamped()
#getting actual position
position_turtlebot = calculate_position()
#calculating transform
now = mydynamictf.get_clock().now().to_msg()
t.header.stamp = now
t.header.frame_id = "odom"
t.child_frame_id = "base_footprint"
t.transform.translation.x = position_turtlebot[0]
t.transform.translation.y = position_turtlebot[1]
t.transform.translation.z = 0.0
euler = Rotation.from_euler('zyx', [0.0, 0.0, 0.0])
quat = euler.as_quat()
t.transform.rotation.x = quat[0]
t.transform.rotation.y = quat[1]
t.transform.rotation.z = quat[2]
t.transform.rotation.w = quat[3]
return t
def mytimercallback():
global mydynamictf
odom_to_base_footprint = calculate_tf()
br = tf2_ros.transform_broadcaster.TransformBroadcaster(mydynamictf)
br.sendTransform(odom_to_base_footprint)
def main():
global mydynamictf
rclpy.init()
mydynamictf = rclpy.create_node('my_dynamic_tf')
mydynamictf.create_timer(1.0 / 30.0, mytimercallback)
try:
rclpy.spin(mydynamictf)
except KeyboardInterrupt:
pass
mydynamictf.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
To simplify the transformation from euler to quaternion we are using a scipy function. For that purpose we need to install the scipy library:
$ pip3 install scipy
Explanation¶
The basic structure of a simple node is already well known. So, only the tf specific lines will be explained.
import tf2_ros
These lines import the essential TF modules. The tf2_ros package provides ROS2 bindings to tf2.
Create an object br of the TransformBroadcaster class:
br = tf2_ros.transform_broadcaster.TransformBroadcaster(mydynamictf)
This will initialize a ROS2 TF2 Broadcaster, which allows to send transforms from one frame to another one.
odom_to_base_footprint = calculate_tf()
Calculates the transform from base_footprint to odom
position = (x,y)
Returns the virtual x and y position of the turtlebot.
br.sendTransform(odom_to_base_footprint)
The handler function sendTransform() for the turtlebot pose broadcasts the turtlebot’s translation and rotation, and publishes it as a transform from frame odom to frame base_footprint.
The sendTransform function is from the message type TransformStamped, which was set up in the calculate_tf definition:
Header
Child Frame ID (Frame ID to which the transform is happening)
Transform
Exercise¶
Run your node and visualize the dynamic tf tree in Rviz.